Compute pricing and the AI safety tax
This is a summary of a paper I created with Robert Trager and Nicholas Emery-Xu. The full version is available on arXiv.
Using a model in which actors compete to develop a potentially dangerous new technology (advanced AI), we study how changes in the price of compute affect actors’ spending on safety. In the model, actors split spending between safety and performance, with safety determining the probability of a “disaster” outcome, and performance determining the actors’ competitiveness relative to their peers. This allows us to formalize the idea of a safety tax, where actors’ spending on safety comes at the cost of spending on performance (and vice versa).
Below we summarize some insights from this model, explained in more detail in the full paper.
Importance of safety’s returns to scale
In addition to the tradeoff introduced by forcing actors to split spending between safety and performance, we also allow for the possibility that safety may be more costly when performance is higher. (It may be more difficult to ensure that more advanced AI systems are safe.) The rate at which the cost of safety scales with performance is critical to understanding how actors will respond to changes in the price of compute.
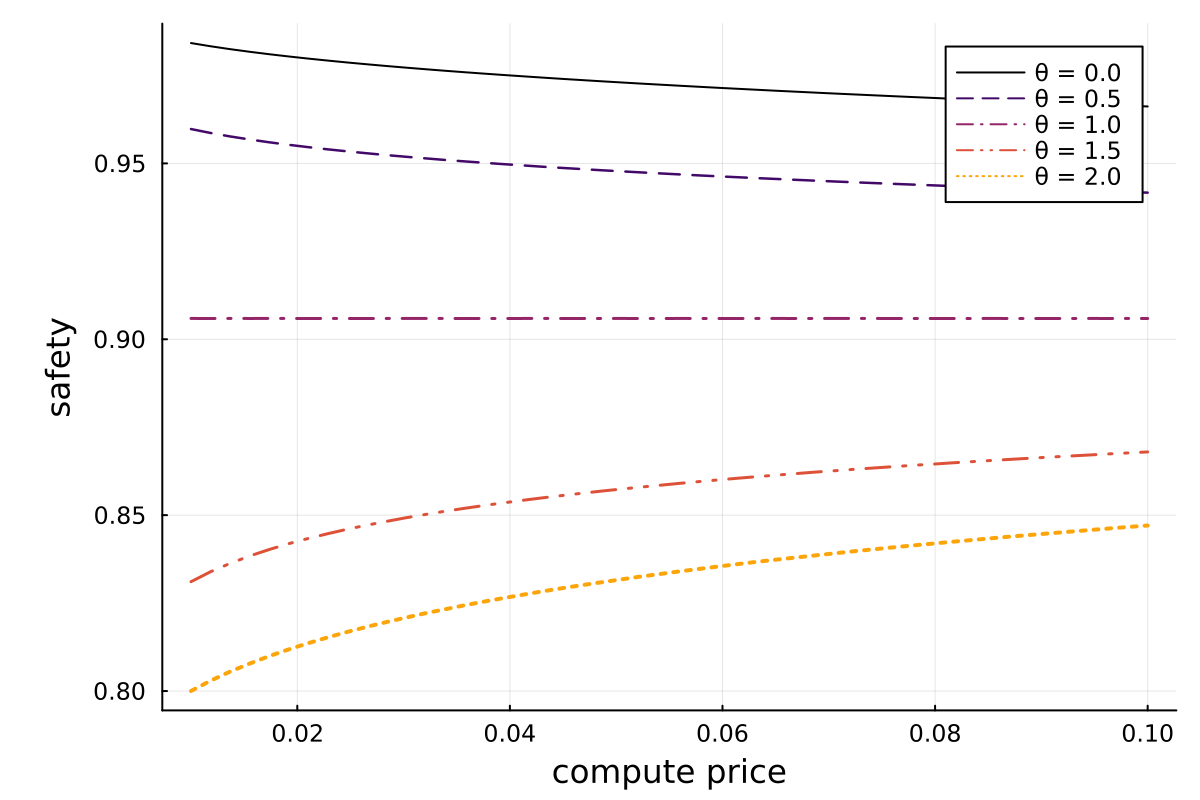
We find that, when actors are identical to each other, a decrease in the price of compute leads to an increase in safety if and only if the production of safety is able to outpace the production of performance in terms of having higher returns to scale (i.e., if a uniform increase in spending on both safety and performance causes safety to increase relative to performance).
This relationship is illustrated in Figure 1. The takeaway here is that, if we expect safety research to require an increasingly large portion of compute resources as performance/capabilities increase, then making compute more expensive is likely to improve safety. We can interpret this as a reframing of the idea that slowing down AI development may be a good way to improve safety.
Monopolies good for safety, competition encourages risk-taking
When there is less competitive pressure to increase performance, actors are able to spend more on safety. Safety therefore tends to be higher if one actor has an overwhelming competitive advantage (meaning they are able to produce performance at a much lower cost, either because they are more efficient or because they face a lower compute price). Safety is relatively lower when competitors are evenly matched, and can actually be especially bad if one actor has only a small advantage, since then laggards might find it beneficial to catch up by trading safety for performance.
Providing a subsidy to a single actor may have a positive or negative effect on aggregate safety, but safety can be made arbitrarily high by providing a sufficiently large subsidy to a single actor.
This insight is not particularly helpful if we are not able to provide an enormous subsidy sufficient to give an actor a decisive advantage, since if the subsidy provided is not large enough, it may actually have a negative effect on safety. It’s therefore worth considering whom (if anyone) should be subsidized if we can only provide a modest subsidy.
In general, subsidizing actors with a performance advantage is better for safety than subsidizing performance laggards, though this is sensitive to some assumptions.
The intuition here is that a subsidy for a performance leader further reduces the competitive pressure on that actor, while a subsidy for a performance laggard just brings them into closer competition with the leader(s).
Often unclear whether to subsidize safety-conscious actors
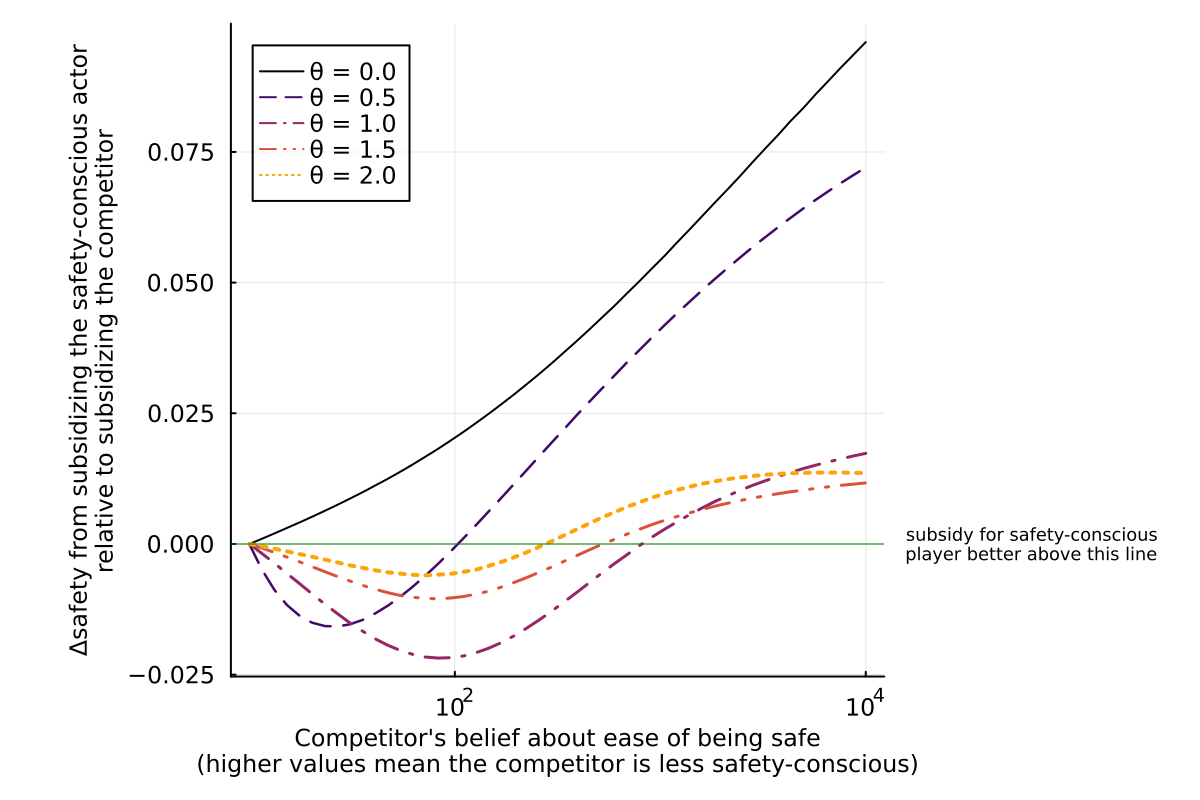
In the case where we cannot give a single player a decisive edge, we might think that helping safety-conscious actors is a good idea. It turns out that this is not always the case; the effect of such an intervention depends on a number of factors, including what exactly is meant by being “safety-conscious.” The basic concern here is that providing a safety-conscious actor with a subsidy might encourage their competitor(s) to take on more risk in order to catch up, while the safety-conscious actor will not take on as much risk to be competitive if their competitor is subsidized instead.
If a safety-conscious actor’s competitor believes that there is near-zero risk of disaster, it is typically better to subsidize the safety-conscious actor. However, the right course of action is unclear if the difference in beliefs is not so stark.
Figure 2 shows an example illustration of this claim.
Some policy implications
There is still a lot of work to do with this sort of model, but we can already give some suggestions relevant for policy.
Increasing compute prices (or otherwise making AI progress more difficult) may be helpful if we are worried about safety keeping pace with capabilities/performance.
Policies that bring actors into closer competition are likely bad for safety. Backing a single, dominant actor may be better.
Subsidizing an actor may have an unforeseen negative effect on safety if competitors respond by taking on more risk to catch up. Providing subsidies to an actor tends to be helpful only when they already have an advantage and/or their competitors are very unconcerned about disaster.
As a general observation, simply changing prices for one or more actors does not come across as an especially promising way to improve safety. Providing subsidies/taxes conditional on actors’ strategies (e.g., giving a discount to actors who pass a safety audit) is probably much better – we are currently looking more into this sort of intervention.